Harvard’s latest robot lacks cables and code. A small team there has created a walker that uses stretched elastic bands to navigate a maze or shove objects into the proper piles. One motor provides the push, but the actual work is done by pulling and twisting the bands themselves.
Leon Kamp oversaw the project as a graduate student in Katia Bertoldi’s lab at the John A. Paulson School of Engineering and Applied Sciences, drawing on his engineering and architectural backgrounds. Kamp recognized an opportunity to combine design and function in ways that echoed old-school mechanics while meeting modern needs. His co-authors, Mohamed Zanaty, Ahmad Zareei, Benjamin Gorissen, and Robert J. Wood, contributed to the development of a construct that can move on command.
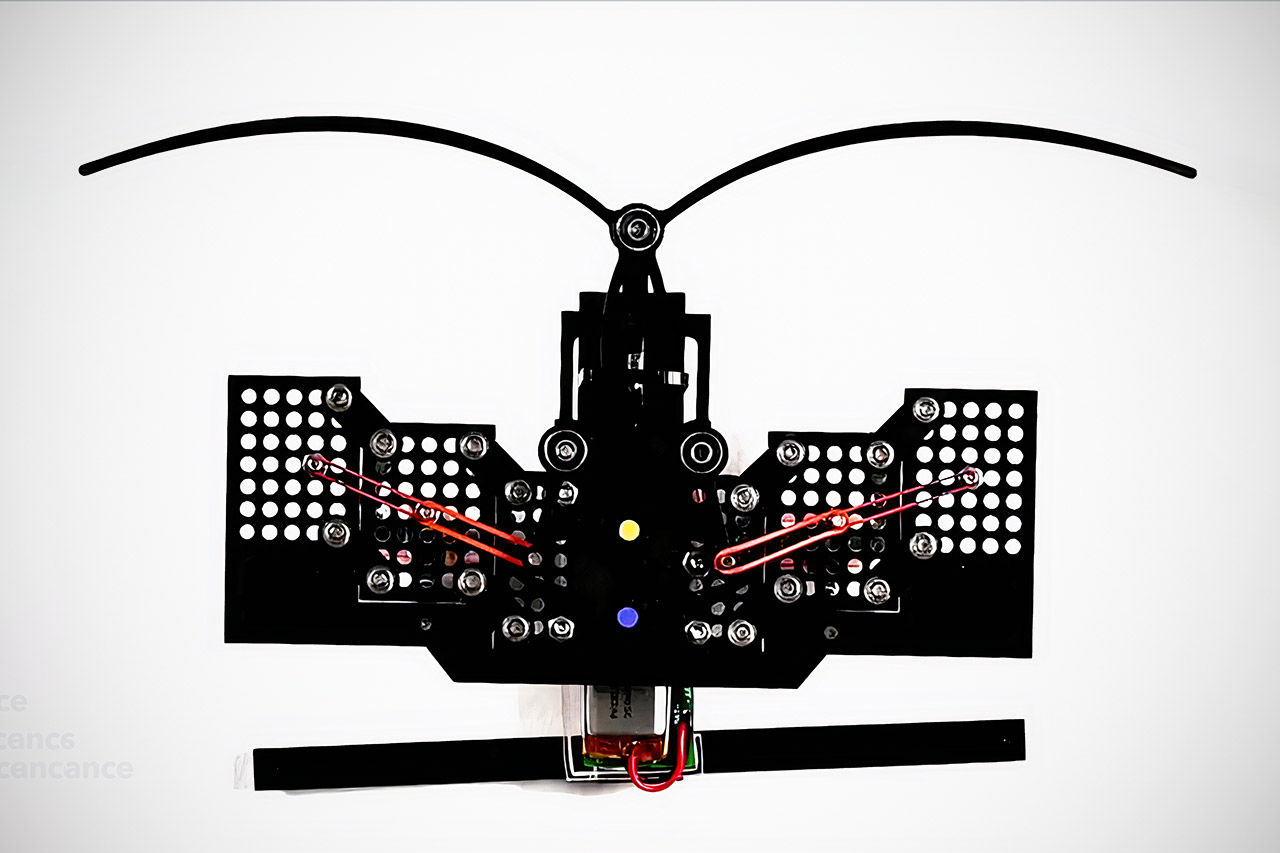
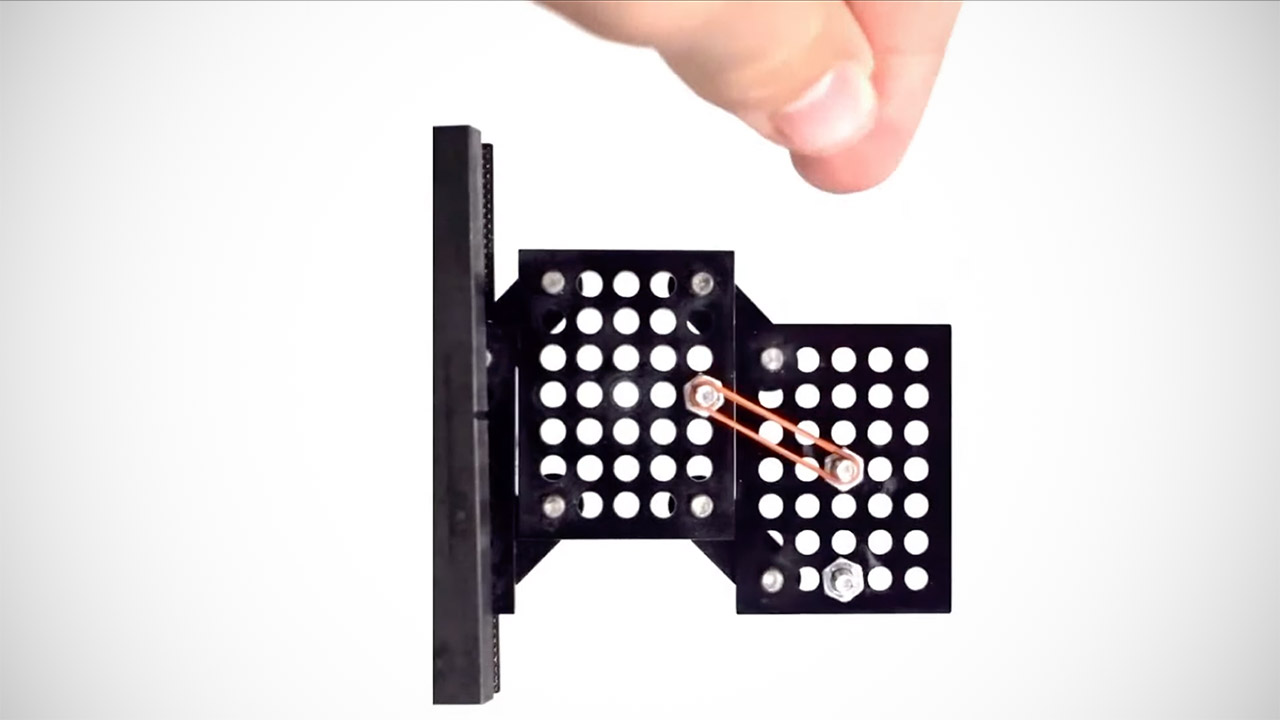
Let’s begin with the machine’s fundamental components, which are a chain of flat plastic blocks linked together by simple levers. Rubber bands span across these joints, each calibrated to produce a distinct pull. When the motor operates the first lever, the bands determine what happens next. They increase resistance to specific paths, so the system favors the route with the least drag. In one configuration, forward mobility prevails, whereas in another, a backward shuffle takes precedence. When you attach a leg to the end of this chain, the blocks rise and drop in order, moving the robot across a level area.
These bands do more than merely walk; they collect energy, much like coiled springs, and then release it to snap levers into place. The robot’s stride changes depending on the length of the band or the anchor point. Shorter bands provide faster steps, while longer ones allow for a looser gait. Kamp’s team tried dozens of these tweaks and discovered patterns that allowed the gadget to adjust without human interaction.
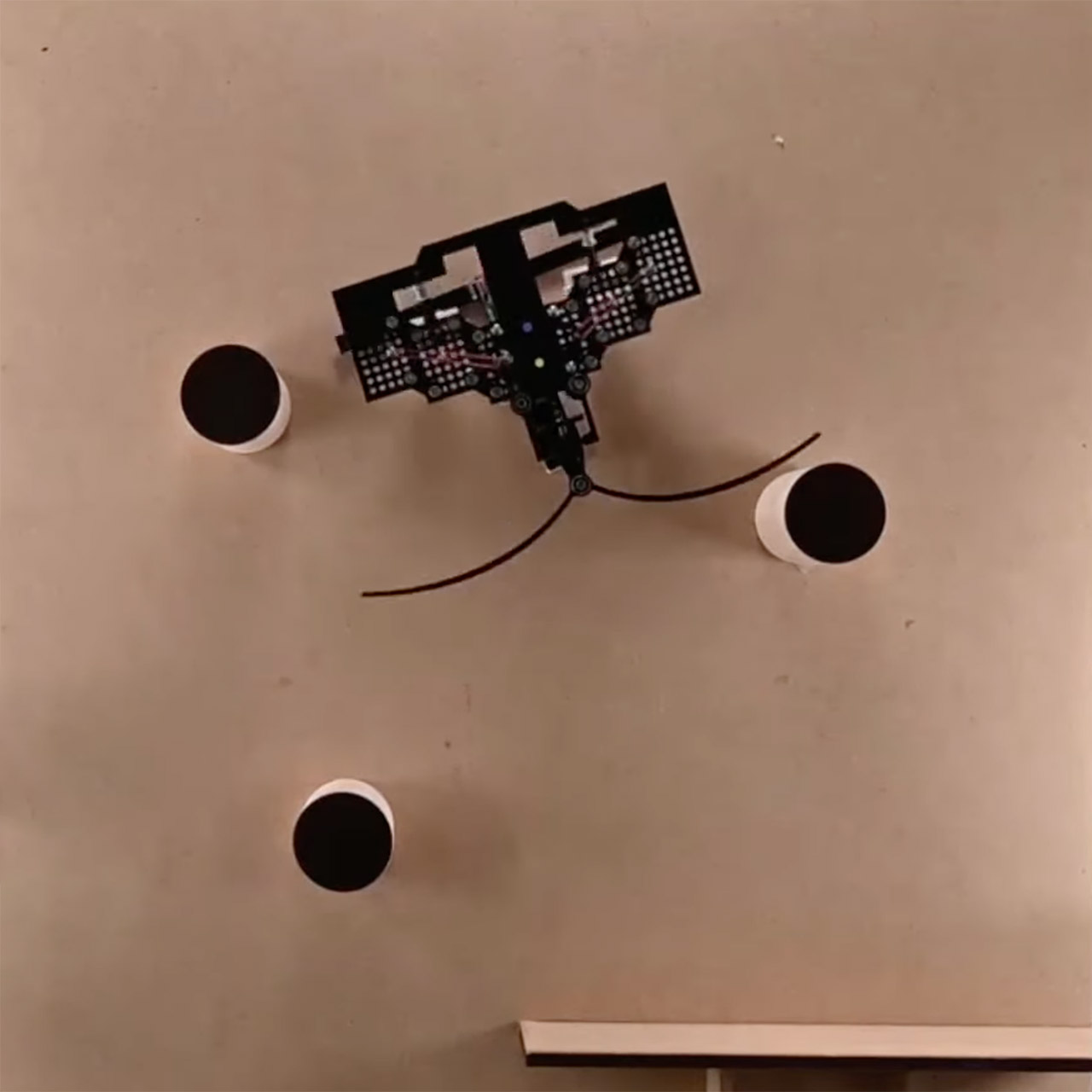
The most innovative feature is the ability to sense the world, as two antennae emerge from the front, lightweight rods that bend when in contact. When you bump into a wall, the impact is transmitted directly to the levers. That contact alters the tension in the bands and reverses the energy flow. Walking straight ahead results in a quick rotation, and the robot steers clear. No cameras scan ahead, and no algorithms process data. The impact reprograms the course within the plastic and elastic. In lab runs, this configuration allowed the walker to navigate small passageways and dead ends while remaining undisturbed.

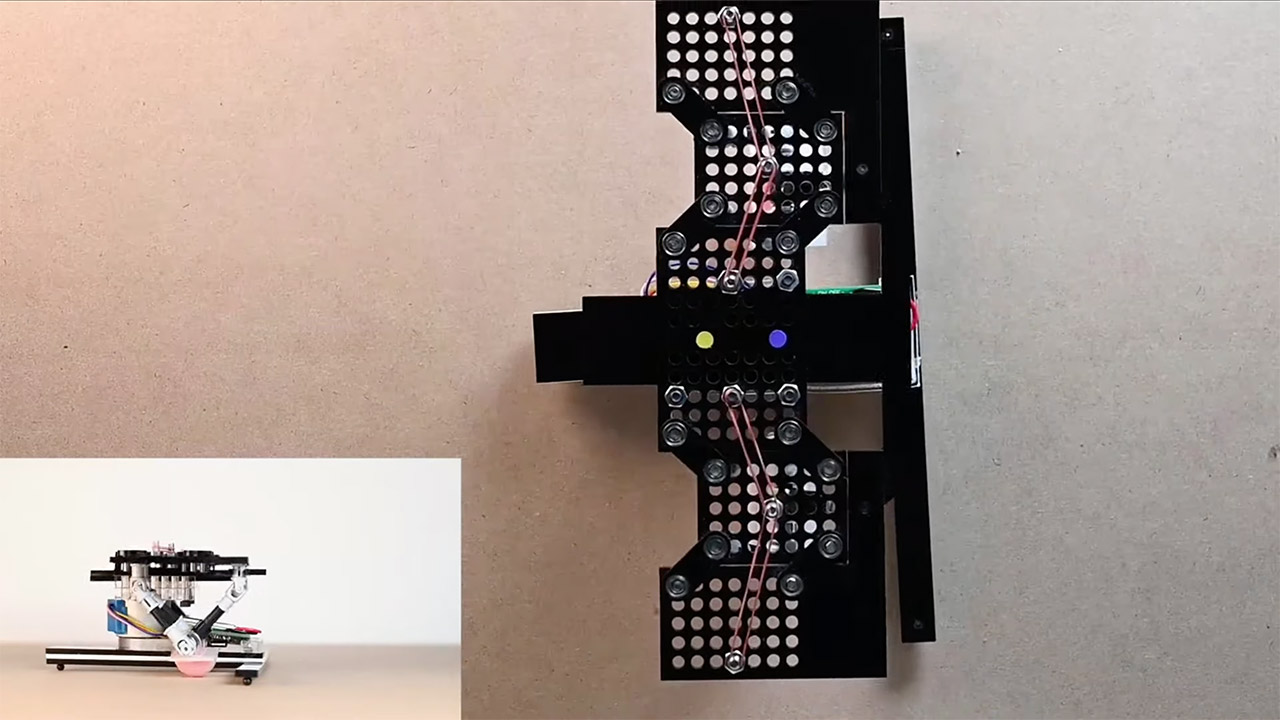
Scale it up to something more practical, such as sorting. Warehouse bots frequently juggle heavy equipment to weigh and stack products. This method flips the script. Load an object onto a lever arm, and the bands determine its weight based on how far they stretch. Lighter loads drop early in the cycle, but bigger ones hold on until a later release point. Kamp’s crew arranged metal discs of varied weights in neat rows as the solitary motor hummed away. Precision came solely from the band’s flexibility – firmer pulls for fine variances, gentler for large categories.
That single motor spins at a constant rate, supplying energy to the chain. Rubber bands magnify it, converting raw torque into directed force. There are no battery drains or circuits that overheat. In tests, the robot ran for hours on a basic DC configuration, outlasting setups with sensor feedback loops. Plastic sheets, off-the-shelf bands, and a handful of pins cost less than $100 altogether. Assemble it in an afternoon and you’ll have a device that learns from bumps and weights without using a single line of code.
[Source]